
-
EQ 플랫폼 제작기_3. 구동부문 설계
-
조회 수: 5042, 2022-07-16 13:29:24(2019-05-16)
-
<글쓰는 순서>
1. EQ 플랫폼 이해
■ EQ 플랫폼 형식 3가지
① CS 플랫폼
② VNS 플랫폼
③ 하이브리드형 플랫폼
④ 기타
2. 구조부문 설계
■ 형식과 재질의 결정
■ 무게중심점의 높이
■ 돕소니언의 무게중심점, 위도에 따른 EQ 플랫폼의 크기
■ CS 원반의 제작
■ VNS의 설계
■ VNS 설계 예시
3. 구동부문 설계
■ 스테핑 모터와 드라이버
■ 모터의 장착과 편의성
4. 극축정렬과 목재가공
■ 극축정렬
■ 하우징 제작
3. 구동부문 설계
■ 스테핑 모터와 드라이버
EQ 플랫폼을 제작하면서 가장 어려웠던 것이 구동부 즉 모터 제어라고 할 수 있겠습니다. 1호기 제작 당시에 사용한 모터는 DC모터였습니다. 그리고 컨트롤러로 사용한 것이 전압 변환기였습니다. DC모터는 그 특성상 전압의 변화에 따라 RPM이 결정되기 때문에 전압만 잘 제어한다면 모터의 속도를 일정하게 유지할 수 있으리라 판단하였습니다. 하지만 이것은 인문계생이 가질 수 밖에 없는 한계였습니다 ㅠㅠ 한 가지 변수만 생각했던 것이죠. 플랫폼에 망원경을 얹어서 움직이면 플랫폼의 기울기에 따라 필연적으로 모터에 가해지는 토크가 변하기 마련입니다. 토크가 높아지면 같은 전압에서도 모터 속도가 느려지는 현상이 발생하는 거죠. 모터가 일정한 속도를 내지 못하고 계속 변화 되다보니 정확한 추적이 안되는 것이죠...

<사진13> 1호기의 컨트롤러
위 사진은 1호기의 컨트롤러입니다. 헤드폰 앰프 만들어본 짧은 전자 지식으로 직접 제작한 장비입니다. 다이얼이 두 개인데, 하나는 전압을 크게 변화시키는 가변저항이고, 하나는 미세하게 변화시키는 가변저항입니다.
앞서 말씀드린 DC모터의 한계를 극복하는 방법은 스테핑 모터로 바꾸는 것이 가장 좋다고 합니다. 그런데, 스테핑모터에 대한 지식이 전혀 없어 어떤 제품을 골라야 하는지 조차 알 수 없었습니다. 이럴 때는 따라하는 방법이 제일 좋은 법. 앞서 소개한 Heijkoop 아저씨가 소개해 놓은 모터와 드라이버를 찾아 미국사이트를 통해서 주문을 하였습니다. 2달 넘게 기다려서 제품을 받았지요. 하지만 설치하여 운용해본 결과 목표로하는 스텝수까지 내려가지 않았습니다. ㅠㅠ 가격도 있고, 발주기간이 너무 길어 부득이 국내 제품으로 교체하기로 하였습니다. 국내엔 엄청나게 많은 제품이 있어 혼란스러웠지만, 해외사이트에서 주문하느라 공부가 좀 되었는지 국내에서 맞는 제품을 찾을 수 있었습니다.
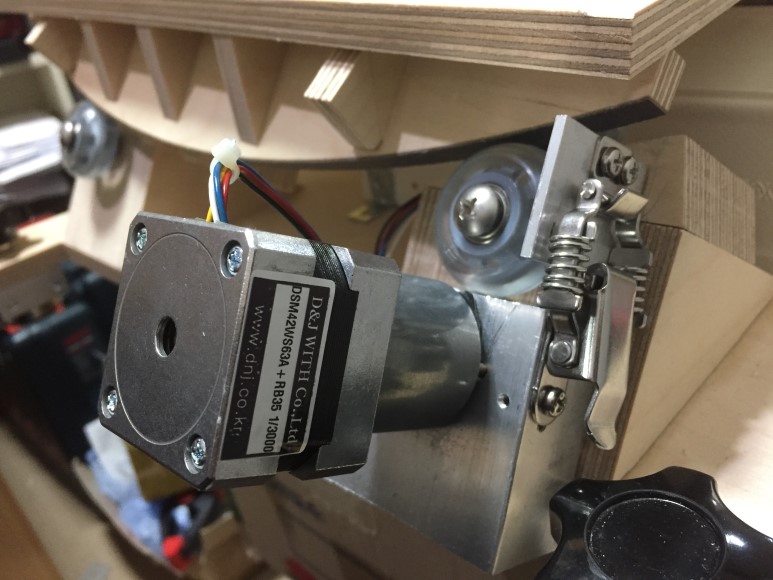
<사진14> 디엔지위드 DSM42WS63A(1/3000감속) 스텝 모터
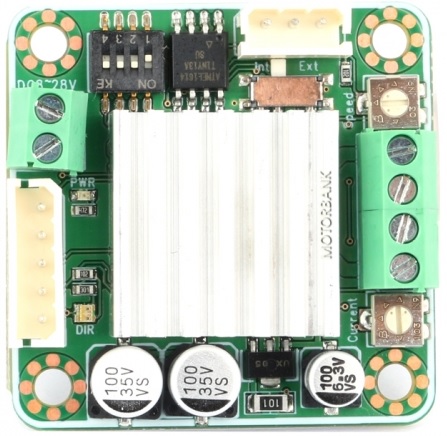
<사진15> 모터뱅크 SBC-10 2상 바이폴라 스테핑모터 드라이버
이제 모터의 속도를 목표로하는 속도까지 맞춰야 하는 작업이 필요했습니다.
일단, 스텝모터의 스펙을 살펴보면, 감속기 1/3,000, 동작전압 12V, 스텝 당 회전각 1.8도입니다.
북쪽 CS는 1시간당 127.1732mm씩 움직이면 정확하게 추적이 되도록 설계하였습니다(전체 원둘레를 24로 나누면 1시간 분량의 이동 거리가 됨). 1분 당 이동거리는 시간당 거리를 60으로 나누어 2.1196mm가 됩니다. 1분에 2mm정도로만 움직여야 한다는 거죠. 그럴려면 굉장히 천천히 돌아야 합니다. 모터샤프트에 커플링을 붙였고 커플링이 구동바퀴를 돌리고 있으므로 커플링 외경이 중요합니다. 커플링은 지름이 20mm이므로 둘레가 62.83mm입니다. 따라서 분당 0.0337바퀴 돈다면 1분에 2.1196mm정도의 거리를 움직인다는 뜻이 되죠. 분당 0.0337RPM은 1/3000로 감속된 속도이므로 실제 모터 속도는 101.2RPM정도 속도를 내도록 맞추면 됩니다.
(이 모터는 스텝당 회전각이 1.8도이므로 1회전 시 스텝수는 200 스텝입니다. 목표 RPM이 101.2이므로, 분당 20,240 또는 초당 337회의 펄스를 발생시키면 정확히 구동이 됩니다.)
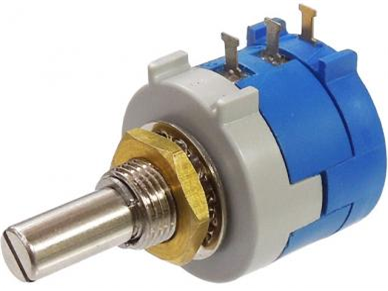

<사진16> Bourns의 3590S 멀티턴 포텐셔미터
제가 구매한 드라이버 부품(모터뱅크 SBC-10 2상 바이폴라 스테핑모터 드라이버) 중에서 모터의 스텝 수를 조절하는 부품은 10K 짜리 가변저항(오른쪽 위에 있는 부품)이었습니다. 이 가변저항은 한 바퀴를 돌리는데 0K ~ 10K까지 조절이 되는 부품입니다. 가변저항은 볼륨을 생각하면 딱 맞습니다. 그런데, 한 바퀴로는 정밀한 조절이 어렵기 때문에 정밀한 조절을 위해 0 ~ 10K까지 10바퀴를 돌려야 도달할 수 있는 멀티턴 가변저항으로 교체하였습니다. 그리고 몇 바퀴 돌렸는지 가늠하기 위해서 아날로그 게이지를 추가하였구요. 이 바닥에서 가장 유명한 제품은 미국의 Bourns에서 나온 3590S라는 모델입니다. 인터넷에 보면 엄청 많은 제품들이 나오는데, 짝퉁이 굉장히 많은 품목이기도 합니다. 필자도 싼 맛에 구매했다가 전혀 작동하지 않는 바람에 애를 먹은 적이 있습니다. 좀 비싸다 싶은 제품을 사야 정품일 것입니다. 하지만 장담할 수는 없습니다.
이 드라이버가 얼마의 스텝을 발생시키는지만 알면 정확히 설정할 수 있을 텐데 이렇게 하려면 오실로스코프 같은 계측기가 필요합니다. 이런 건 엄청 비싸겠지요... 그래서 할 수 없이 완성 후에 별을 보면서 속도를 세팅하였습니다. 아날로그 게이지가 있으므로 이를 기억하고 있으면 언제든지 재현할 수 있는 장점이 있습니다.
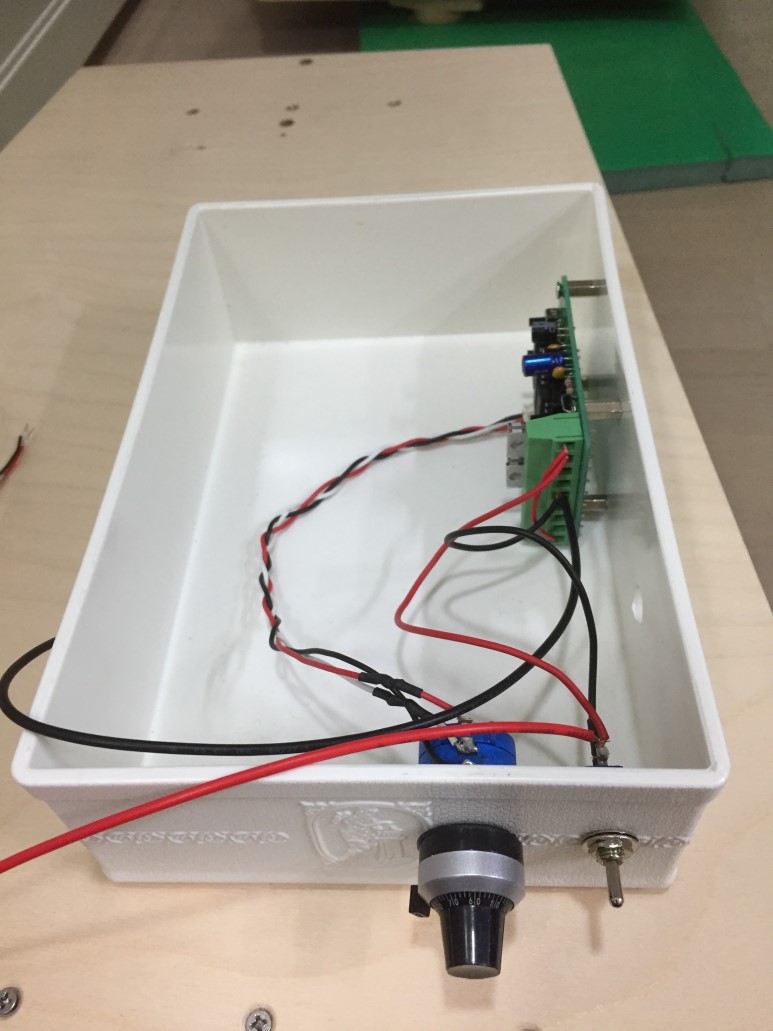
<사진17> 스텝모터 컨트롤 박스
다이소에서 구매한 플라스틱 박스에 컨트롤러와 가변저항, 그리고 전원 스위치를 장착한 모습입니다. 아직 완성 전이라 좀 무질서해 보입니다. 감안 해서 봐주면 좋을 듯 합니다.
■ 모터의 장착과 편의성
모터를 장착하는 방법에 따라 EQ 플랫폼의 편의성과 직결되는 문제가 하나 있습니다. EQ 플랫폼의 움직임(추적)은 시작과 끝이 있는데, 추적이 끝나면 다시 원래 위치로 어떻게 되돌리는 것이 편리한가의 문제입니다. 모터를 반대 방향으로 돌리면 되겠지만, 이 경우에는 고속으로 되돌리는 기능이 있어야 합니다. 고속으로 되돌린다 해도 시작 위치로 되돌아 가는데는 상당한 시간이 걸릴 가능성이 있습니다. 모터에 감속기어들이 잔뜩 들어 있어서 빠른 속도를 내는데 상당히 힘들 것이기 때문입니다. 그리고, 결정적으로 저는 그런 기술이 없다는 게 문제이지요. ㅠㅠ 현재 스테핑 모터 구동 드라이버에는 반대 방향으로 돌리는 기능은 있으나 속도 제어는 상당히 제한적이었습니다.

<사진18> 야간비행의 강창호님이 제작한 EQ 플랫폼 (출처: www.nightflight.or.kr)
야간비행의 강창호 님께서 만든 플랫폼을 보면 VNS방식이면서 구동부분이 스텐레스로 되어 있습니다. 그래서 어떻게 원래 상태로 되돌리는지 물어 봤더니 스텐레스라 마모될 염려가 거의 없기 때문에 마찰이 일어나더라도 그냥 발로 강하게 밟아서 되돌린다고 하셨습니다. 저의 1호기를 스텐레스로 만들었던 이유가 여기에 있었습니다. 하지만 재질을 목재와 바퀴로 전환한 지금 우격다짐으로 되돌릴 수는 없는 법... 사실상 가장 참고를 많이 한 Heijkoop의 방법을 보면, 동력 전달할 때는 모터에 용수철을 달고 나사못에 걸어 두는 방법을 쓰고, 플랫폼을 원위치 시킬 때는 용수철을 풀어서 수동으로 되돌리는 방법을 쓰고 있습니다.
<사진19> Heijkoop이 고안한 동력전달 방안 (출처: http://astrosurf.com/aheijkoop/Equipment/EqPlatform.htm)
Heijkoop 아저씨가 쓴 방법을 조금만 응용하면 모터가 직접 동력 전달하던 부분을 잠시 뗄 수 있을 것이므로 플랫폼을 자유롭게 움직이게 하여 간단하게 발로 밟아서 되돌릴 수 있을 것 같았습니다.


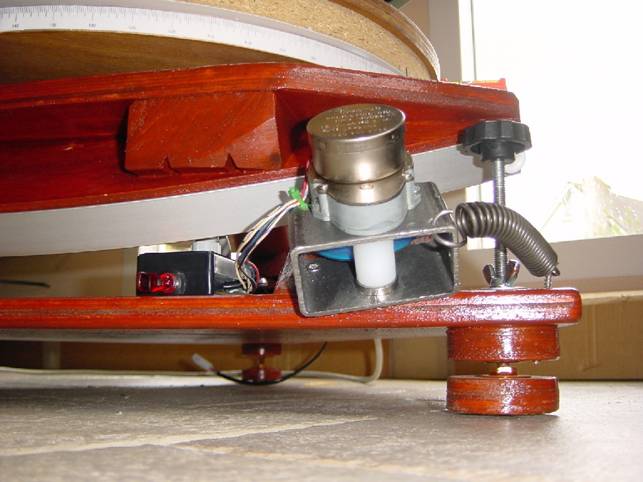
<사진20,21> 스프링 매미고리를 활용한 동력전달
그래서 이 부분을 집중적으로 고민하였습니다. 앞선 사례처럼 스프링을 달고 뗐다 붙였다 하는 것도 생각해보면 그리 편리할 것 같지 않았으므로 고민 끝에 스프링 매미고리를 달게 되었습니다. 사진에서 보는 것 같이 매미 고리는 동력 전달했다가 끊었다가 하기에 매우 편리하였습니다. 더구나 스프링이 장착되어 있어 탄성도 있기 때문에 장착 시에 조금 잘못 붙여도 어느 정도 극복하게 하였습니다. 매미고리를 풀면 자유롭게 움직여지고, 조이면 모터의 구동에 의해서만 움직여 집니다. 참고로 사진상의 모터는 향후 국산 모터로 바꾸었습니다.
<다음에 계속>
- controller.jpg(389.6KB/18)
- stepmotor.jpg(89.9KB/26)
- stepmotor_controller1.jpg(72.5KB/18)
- image.png(130.6KB/16)
- image1.png(55.4KB/18)
- eq_motor_driver2.jpg(106.1KB/14)
- EQ_Platform_kang3.jpg(177.9KB/19)
- EQ_Platform_heijkoop1.jpg(41.1KB/18)
- eq_clamp_open.jpg(122.1KB/27)
- eq_clamp_close.jpg(121.0KB/15)
- eq_clamp_open.jpg(122.1KB/13)
| 번호 | 제목 | 이름 | 조회 | 등록일 |
|---|---|---|---|---|
| ⇒ | 이현동 | 5042 | 2019-05-16 | |
| 302 | 이현동 | 6090 | 2019-05-13 | |
| 301 | 이현동 | 6648 | 2019-05-13 | |
| 300 |
클래식돕에 핸들바퀴달기
+5
| 김대익 | 4250 | 2019-05-02 |
| 299 | 유준상 | 4415 | 2019-03-25 | |
| 298 | 류혁 | 6922 | 2019-02-24 | |
| 297 |
EQ 플랫폼 재도전
+8
| 이현동 | 6198 | 2019-02-12 |
| 296 |
두가지 개조작업
+10
| 류혁 | 8204 | 2019-02-03 |
| 295 |
10"f4돕소니안
+7
| 김남희 | 6446 | 2019-01-26 |
| 294 | 이현동 | 6580 | 2018-12-22 |
자세하게 부품들까지 올려주시는 정성에 큰 도움이 되었습니다. 수많은 스텝모터와 드라이버 중에서 뭘 선택해야 할 지 고민이 많은데 단박에 정리가 되네요. ^^ 특히 SBC-10 2상 바이폴라 스테핑모터 드라이버는 저렴하면서도 기능이 좋네요.
스프링매미고리도 더 깔끔하고 좋습니다. 보기에는 쉬워 보이는데 보조적인 금속파트나 목공작업의 정성이 느껴집니다. 강창호님의 자작기와 더불어 EQ 플랫폼 자작에 정말 도움이 되는 자작기입니다. ^^