
-
EQ 플랫폼 제작기_2. 구조부문 설계
-
조회 수: 6972, 2019-05-18 20:52:42(2019-05-13)
-
<글쓰는 순서>
1. EQ 플랫폼 이해
■ EQ 플랫폼 형식 3가지
① CS 플랫폼
② VNS 플랫폼
③ 하이브리드형 플랫폼
④ 기타
2. 구조부문 설계
■ 형식과 재질의 결정
■ 무게중심점의 높이
■ 돕소니언의 무게중심점, 위도에 따른 EQ 플랫폼의 크기
■ CS 원반의 제작
■ VNS의 설계
■ VNS 설계 예시
3. 구동부문 설계
■ 스테핑 모터와 드라이버
■ 모터의 장착과 편의성
4. 극축정렬과 목재가공
■ 극축정렬
■ 하우징 제작
2. 구조부문 설계
■ 형식과 재질의 결정
앞서 살펴본 EQ플랫폼의 형식은 그 순서대로 발전해왔다고 볼 수 있습니다. 초기에는 CS방식을 쓰다가 VNS방식으로 발전했으며, 마지막에는 하이브리드 방식으로 진화했다고 할 수 있겠지요. 하지만, 실제 EQ플랫폼 업체들이 시판하는 제품을 보면 CS방식부터 하이브리드까지 다양한 모습을 보여 줍니다.

<사진10> 국내에서 개발된 Space Arrow Model 2
국내에서 개발되어 유일하게 시판되었던 Space Arrow의 경우 초기에는 VNS로 시작했다가 후기 모델은 오히려 CS모델을 채택하기도 하였습니다(그러면서 CS방식으로 바꾸면서 정밀도가 향상되었다는 표현도 나옵니다-‘극축과 평행한 원형 회전방식으로 추적 정밀도 향상’). VNS나 CS가 혼재되는 것은 해외 아마추어들의 경우에서도 마찬가지로 나타나는 현상입니다. 따라서 제가 보기에 결국 ‘큰 차이가 없다’고 보는 것이 더 맞는 듯합니다. 저의 1호기는 VNS였고 실패까지 했으니 2호기는 자연스럽게 CS방식을 채택하였습니다.
<사진11> 1호기의 VNS(Vertical North Segment)와 샤프트
1호기 제작 당시에 VNS의 재질을 스텐레스로 하고, 이를 구동하는 샤프트도 스텐레스 샤프트를 이용하였습니다. 원래 금속이 맞닿으면 마찰력이 생겨 쉽게 미끌어지지 않는 현상이 있는데, 막상 제작하고 보니 약간의 오차로 정확히 맞닿지 않아 쉽게 미끌어지더군요. 재질이 스텐레스 재질이라 새로 연마하는 것도 쉽지 않았고, 이를 알미늄으로 바꾸면 무른 성질 때문에 곡면이 훼손되는 단점이 있었습니다. 참고로, 금속 간 마찰력을 적극적으로 이용한 제품이 크레이포드 포커서입니다. 실제 크레이포드 포커서를 뜯어보면 금속 샤프트와 드로우튜브가 단순히 맞닿아 있음을 볼 수 있습니다. 심심할 때 한 번 뜯어보시기 바랍니다. 여기서 쓰는 방식도 결국 같은 개념입니다.

<사진12> 2호기의 CS(Circle Segment)와 고무바퀴
1호기 VNS에서 생긴 미끌어짐 현상을 줄이기 위해 2호기에서는 CS방식을 채택하였습니다. CS를 나무로 하고 구동도 고무바퀴를 활용하여 이를 마찰시키는 방법을 사용하여 미끌어지는 현상을 현격히 줄였습니다. CS 플랫폼은 설계도 상대적으로 간단히 할 수 있으므로 1호기 때의 복잡한 수학에서 해방될 수 있었습니다. 다만, CS를 기울여 장착하는 것이 조금 까다롭습니다. 고무바퀴는 인라인 스케이트 바퀴가 딱딱하면서도 마찰력이 좋으므로 해외 제작자들도 많이 사용하는 것을 볼 수 있습니다. 무엇보다 CS를 나무로 할 수 있다는 점이 제작의 용이성 면에서 큰 장점이 되었습니다.
■ 무게중심점의 높이
EQ 플랫폼에서 중요한 부분은 전체 무게중심점의 높이입니다. 망원경과 플랫폼 상판을 한 덩어리로 봤을 때의 정확한 무게 중심점을 찾아야 합니다. 무게중심점 차이가 많이 날 경우 플랫폼의 움직임에 따라 하중이 달라지고, 심한 경우에는 경통이 넘어질 수도 있습니다.
보통 돕소니언 경통(로커박스를 제외한 경통만)의 무게중심은 쉽게 알 수 있습니다. 고도베어링의 중심점이 돕소니언 경통의 무게중심이죠. 하지만 로커박스와 플랫폼 상판의 무게까지 고려했을 때의 무게중심점은 좀 어려워집니다. 3D 캐드를 쓸 수 있다면 몇 가지 정보만 있으면 금방 알 수 있을 테지만, 쉽게 배우기 어려우므로 무게중심점을 수기로 구하는 방법을 소개하고자 합니다.
<그림3> 무게중심점 산출
필요한 정보는, 경통무게(V)와 경통 무게중심점 높이(A), 경통 외 파트(로커박스+플랫폼상판)의 무게(W)와 경통 외 파트의 무게중심점 높이(B)입니다. 보통 로커박스와 플랫폼 상판은 같은 덩어리로 움직이기 때문에 경통 외 파트로 합쳐서 생각하면 됩니다. 경통 외 파트(로커박스와 플랫폼 상판)의 중심을 구하기 위해서는 가장 원시적인 방법을 쓰는 것이 빠릅니다. 일단 이 둘을 테이프로 감아서 붙인 뒤 눕혀서 균형이 되는 점을 찾는 방법입니다. ㅠㅠ
전체 무게중심점(Y)은 경통의 무게중심점(A)과 경통 외 파트(로커박스+플랫폼상판)의 무게중심점(B)의 사이 어디쯤 있을 것입니다. 따라서 두 가지 무게중심점의 차이를 C라고 하면, C=A-B로 표현할 수 있고, Y는 경통무게중심 A를 기준으로 Xcm 떨어져 있다고 가정하면, Y=A-X로 표현할 수 있습니다. 따라서 X를 구하면 Y도 구할 수 있습니다.
경통이 플랫폼에 가하는 토크(S)와 경통 외 파트(나머지 로커박스+플랫폼상판)가 가하는 토크(T)가 같아지는 지점이 전체 무게중심점일 것이므로, 아래 등식이 성립합니다.
경통의 토크 – (로커박스+플랫폼상판)의 토크 = 0
즉, S-T=0
S=V*X, T=W*(C-X) 이므로 대입하여 풀면, X를 구할 수 있고, Y = A-X 이므로 Y를 쉽게 구할 수 있습니다.
예를 들어 봅시다.
경통무게[V] = 15kg
경통무게중심점[A] = 53cm
로커박스+EQ상판무게[W] = 8kg
로커박스+EQ상판 무게중심점[B] = 7cm(플랫폼에서부터의 높이임)
무게중심점의 차이[C] = A-B = 46cm
S-T=0
(V*X) - {W*(C-X)} = 0
X = (W*C)/(V+W) = 16cm
따라서 Y = A – X = 37cm
참고로, B의 높이는 플랫폼에서부터의 높이이므로, Y도 플랫폼에서부터의 높이입니다.
■ 돕소니언의 무게중심점, 위도에 따른 EQ 플랫폼의 크기
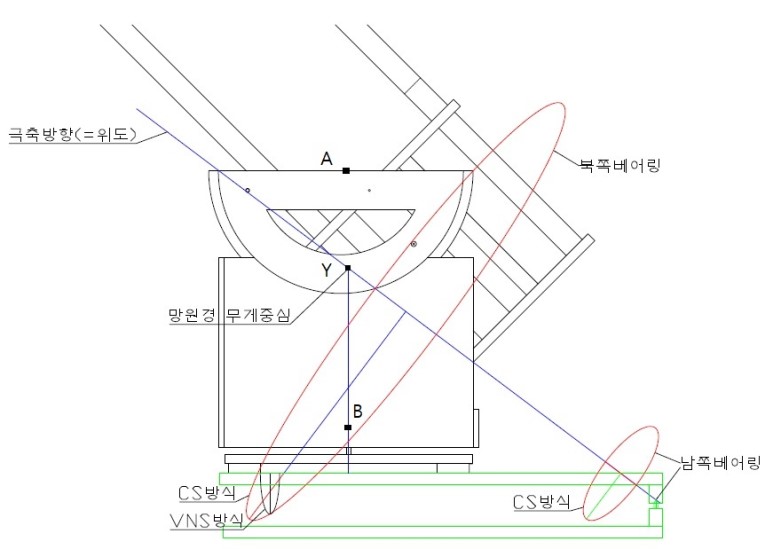
<그림4> EQ 플랫폼 단면도
위 그림에서 보듯이 돕소니언의 무게중심점이 높아질수록 꼭지점이 길어지므로 EQ플랫폼은 길어지고 전체 크기도 넓어집니다.
<그림5> 위도 변화에 따른 EQ 플랫폼 크기 변화
다만, 위도가 상당히 높다면 무게중심점이 다소 높더라도 적당한 크기로 제작이 가능합니다. 이것은 북위 45도 이상의 유럽지역에 살고 있는 아마추어들이 많이 유리하겠지요. 그래서 필요는 발명의 어머니라고, 이런 고민을 안고 있는 아마추어들이 아래와 같은 방법을 생각했습니다.
<그림6> CS 방식으로 변환
남쪽 베어링을 CS방식으로 처리하는 경우입니다. 처음 이 부분을 생각했을 때 제대로 추적이 되는 것인지 의문스럽기도 했지만 만들어보니 크게 문제가 보이지 않았습니다. 하이브리드형 플랫폼이 가능한 지점이라 생각됩니다.
■ CS 원반의 제작
CS원반은 위 <그림4>에서 선분AB를 반지름으로 하는 원반의 아랫 부분을 잘라내면 됩니다.
<그림7> CS방식 회전원반 개념도
위 <그림7>에서는 좌측에 보이는 조각이 CS(Circle Segment)이고, 설치를 위해 적절히 캐드 작업을 한 도면이 아래 그림입니다.

<그림8> Circle Segment
■ VNS의 설계
이번 2호기에서는 CS원반을 사용하는 것이지만, VNS 방식일 때의 제작방법을 짚고 넘어가는 것이 좋을 듯합니다. 결국 같은 개념인데, CS를 기하학적으로 조금 변형한 것이 VNS입니다.
본격적으로 설명하기 전에 직관적으로 한번 생각해 봅니다. 위에 있는 <그림8>을 한번 봐주시기 바랍니다. 이 도면은 회전원반 조각(CS)을 90도 각도로 정면에서 본 모습이겠지요. 이 원반이 장착이 될 때에는 아래쪽을 자기 자신 쪽으로 튀어나오게 하여(아래 쪽이 나와 가까워지게 하여) 장착해야 합니다. 그러면 우리 눈에 보이는 모습이 어떨까요? 좌우 길이는 같은데 상하 폭은 작아진 것처럼 보입니다. 원래는 원형인데, 우리 눈에 보이기에는 타원형으로 보이는 것입니다. VNS가 수직으로 세워서 장착하는 것임을 상기시켜 본다면 타원형으로 만들어야만 원래의 코스로 회전하게 될 것입니다. 이런 아이디어로 출발한 것이 VNS입니다.
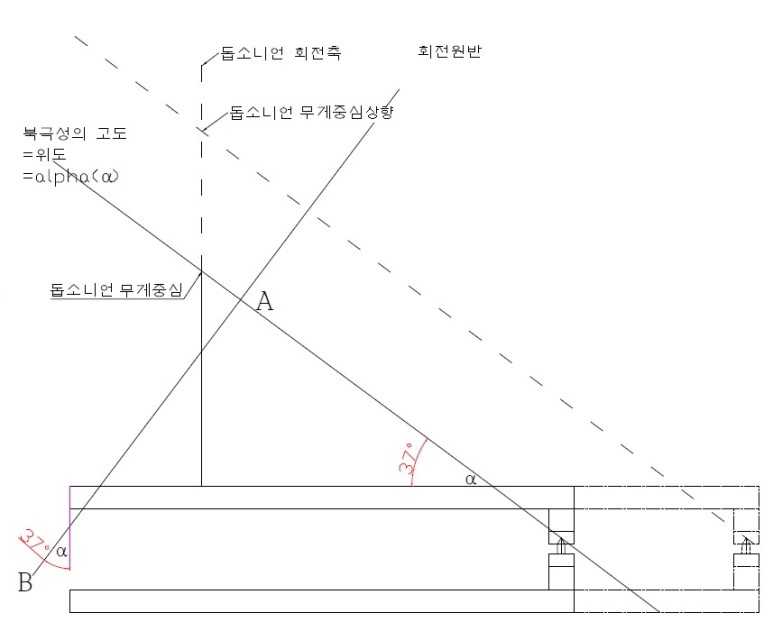
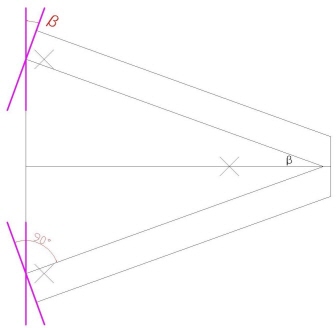
아래 개념도와 함께 좀더 자세히 설명해보고자 합니다.
위 그림에서 α값과 β값이 무엇인지 살펴보면서 다음 단계를 생각하면 되겠습니다. α값은 위도에 해당되는 값입니다. 그럼 β값은 왜 존재할까요? 결론적으로 β값은 회전축과 90도가 되도록 꺽어 줌으로써 정확한 추적을 하도록 만들기 위함입니다. 아래 설명을 보면 좀더 명확히 이해할 수 있습니다.
▷ 1단계 : 회전원반의 세로 폭을 cos α만큼 줄임
<그림10> CS의 기하학적인 변형(1단계)
앞서 살펴본 대로 CS방식은 회전원반을 기울여 장착합니다. 이렇게 기울어진 회전원반(CS)을 수직으로 세우려면 투영방식을 사용하여 타원형으로 만들어야 합니다. 마치 정면에서 본 은하는 둥근형태이지만, 안드로메다처럼 기울어진 은하를 보면 타원형으로 보이듯이, 기울어진 회전원반이 회전운동을 해도 정면에서 보면 타원운동을 하는 것 처럼 보이는 점을 활용한 것입니다. CS방식 북측 베어링의 상하 지름을 cos α(alpha)만큼 줄여 타원궤도를 만든 다음 수직으로 세워 움직이게 하면 결과는 똑같이 됩니다(α값은 VNS방식의 개념도 참조). 인문계 수학실력에서는 좀 힘들었습니다. ㅠㅠ 암튼, 직각삼각형의 한 변을 구하는 삼각함수 공식을 검색사이트를 동원하여 적용해보니 VNS의 세로 길이에 대해 어느 정도 이해가 되었습니다.
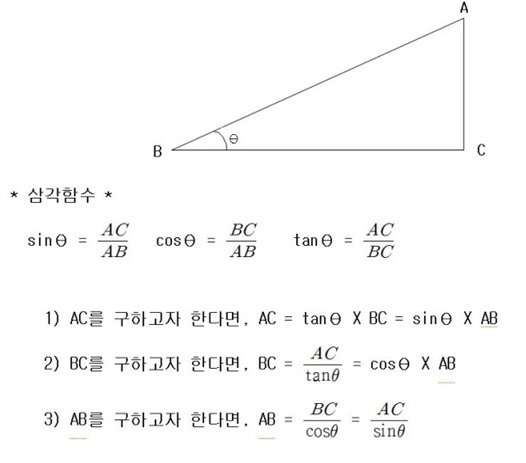
<그림11> 삼각함수 공식들
고등학교 때 기억을 더듬어 보시라고 삼각함수 공식을 인용했습니다. 생각해보면 우리가 구하는 것이 위 삼각형 기준으로 보면 BC에 해당됩니다. 여기서 나오는 θ는 우리의 경우에는 α이므로 한두번 뒤집은 모습이라 생각하면 됩니다. 혼돈하실까봐 우리가 만들고 있는 플랫폼의 경우로 가져와서 생각해보면 아래와 같습니다.
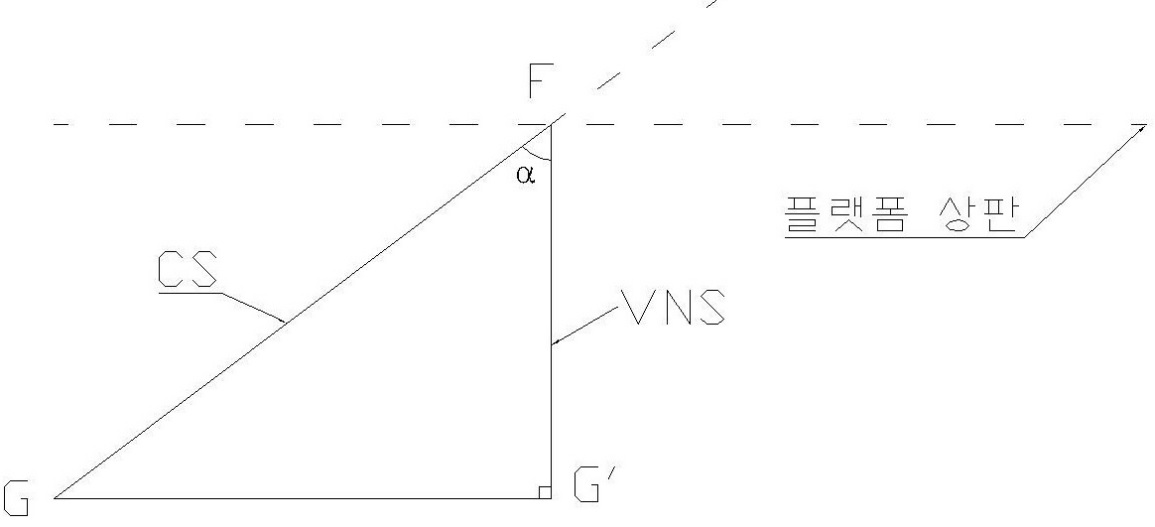
<그림12> CS를 VNS로 변환하기
<그림12>에서 보듯이 우리는 FG길이와 α를 알고 있으므로 아까 살펴본 삼각함수에서 응용하면 FG’ = FG * Cos α 임을 알 수 있습니다.
어쨌든 회전원반을 타원형으로 만들기 위해서는 상하반지름 AB*cos α(alpha) 만큼 상하 지름을 줄이면 됩니다. α값은 해당 지역의 위도와 같으므로 위도를 37도라 가정할 경우 AB*cos37로 계산하면 상하 반지름은 AB → AB’로 줄어듭니다. 물론 여기서 좌우 길이(AC)는 줄어들지 않습니다.
이렇게 해서 만들어진 조각을 플랫폼에 붙인다면 아래 그림처럼 될 것입니다.
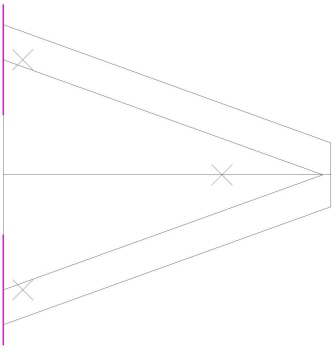
<그림13> VNS 1단계 변형 후 모습(위에서 본 모습)
플랫폼을 위에서 본 모습이구요, X표시가 된 곳은 여기에 올릴 돕소니언 발자국의 위치를 표시한 것입니다. 좌측에 보라색으로 보이는 부문이 VNS입니다. 보시다시피 이대로는 사용하기에 곤란한 점이 있습니다. 그래서 아래 2단계 보정이 필요합니다.
▷ 2단계 : 가로폭을 1/cosβ만큼 늘림
<그림14> CS의 기하학적인 변형(2단계)
회전원반을 타원형으로 만들었지만, 플랫폼의 상판은 남쪽의 피봇 지점을 축으로 하여 회전운동을 하게 되므로 north segment를 남쪽 축과 90도 방향을 이루는 각도(β)만큼 꺽어주어야 일정한 속도로 추적을 할 수가 있습니다. 아래 그림을 보시면 이해가 될 듯 합니다.
<그림15> VNS 2단계 변형 후 모습(위에서 본 모습)
β의 경우 VNS를 남쪽으로 꺽은 각도인데, 아까 공부한 삼각함수 공식을 떠올리면 좋겠습니다. 만약 β값이 20도라면, AC*(1/cos20)으로 계산하면 됩니다. 그러면 가로 방향의 반지름은 1/cos20만큼 늘어나 AC → AC’가 됩니다. 이 β값은 상판의 크기를 얼마로 할지에 영향을 받으므로 캐드로 도면을 그려보기 전에는 예측하기가 어렵습니다. 만일 상판 크기를 조금 더 크게 하려 한다면 β값이 더 커질 수도 있고, 작게 하려 한다면 β값이 작아질 수도 있습니다.
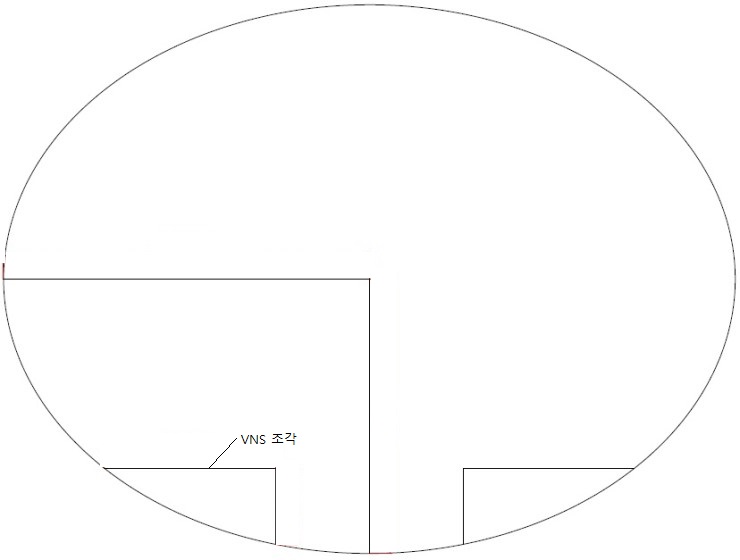
<그림16> VNS 조각 도출
이렇게 구해진 타원에서 필요한 VNS조각을 잘라내어 사용하면 됩니다.
■ VNS 설계 예시(*실물을 대상으로 든 예시가 아닙니다)
회전반지름 AB = 500, 제작상 위도가 북위 37도, VNS 꺽임 각도가 20도라고 할 경우,
AB’= 500 * cos37 = 399.3178
AC’= 500 *(1/cos20) = 532.0889
따라서 타원에서 긴 방향의 반지름은 532.0889mm, 짧은 방향의 반지름은 399.3178mm가 됩니다. 이 타원을 그린 후 조각을 잘라내면 되는데, 조각을 자를 때는 아래 기준으로 자르면 됩니다.
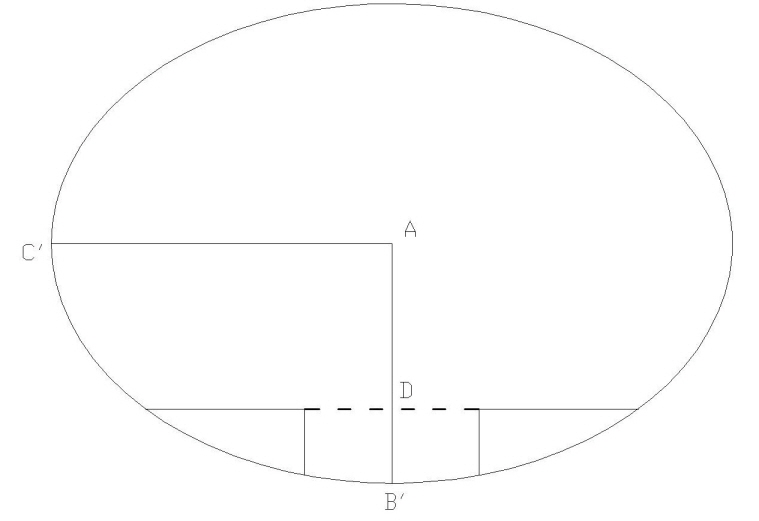
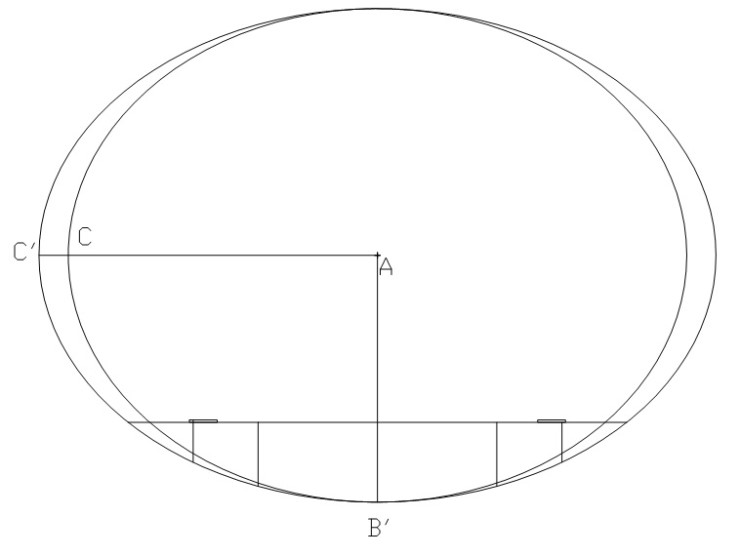
<그림17> VNS 조각의 결정방법
<그림18> VNS 조각의 결정방법
<그림17>의 타원에서 DB‘의 길이는 <그림18>에서 플랫폼 상판을 기준으로 보면 FG’와 길이가 같습니다. 즉 상판 아래 내려오는 FG의 길이를 정하면 자동으로 VNS 부분의 높이도 정할 수 있습니다. 만약 FG의 길이가 75mm였다면, FG’의 길이는 75*cos37=59.8977mm가 됩니다.
<다음에 계속>
- spacearrow2.jpg(43.5KB/34)
- IMG_2709.jpg(93.6KB/27)
- eq_cs1.jpg(84.8KB/36)
- EQ_Platform_planning_1.jpg(49.5KB/39)
- EQ_Platform_planning_alpha1.jpg(34.4KB/27)
- EQ_Platform_planning-2.jpg(35.5KB/24)
- EQ_Platform_planning_reduce.jpg(20.0KB/37)
- EQ_Platform_planning_circle_origin.jpg(47.3KB/59)
- CS원반.jpg(7.3KB/33)
- EQ_Platform_planning_alpha_beta_1.jpg(74.5KB/25)
- EQ_Platform_planning-3.jpg(39.0KB/33)
- 삼각함수.jpg(33.6KB/30)
- CS_to_VNS.jpg(50.0KB/38)
- EQ_Platform_planning-4.jpg(22.4KB/34)
- EQ_Platform_planning_circle_1.jpg(23.8KB/22)
- VNS3.jpg(56.2KB/39)
- CS_to_VNS3.jpg(36.1KB/31)
- VNS4.jpg(34.5KB/27)
- VNS_Beta11.jpg(14.8KB/34)
- VNS_Beta22.jpg(17.8KB/37)
| 번호 | 제목 | 이름 | 조회 | 등록일 |
|---|---|---|---|---|
| 266 |
몇가지 개조 및 자작
+4
| 류혁 | 8271 | 2016-12-18 |
| 265 |
조강욱님만 보세요.~~
+11
| 김남희 | 7709 | 2016-12-14 |
| 264 |
새 장비 신고 FS60CB
+10
| 최윤호 | 5980 | 2016-12-10 |
| 263 | 류혁 | 8811 | 2016-11-23 | |
| 262 | 김태환 | 10167 | 2016-11-14 | |
| 261 | 김남희 | 9827 | 2016-10-01 | |
| 260 | 이현동 | 44715 | 2016-09-30 | |
| 259 | 이현동 | 9916 | 2016-09-29 | |
| 258 |
28"돕소니안
+33
| 김남희 | 10921 | 2016-09-28 |
| 257 | 이현동 | 72086 | 2016-09-27 |